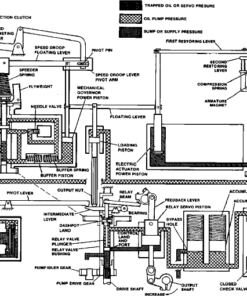

Le contrôle de la vitesse de secours est réalisé par le fonctionnement simultané de systèmes de régulation hydromécaniques (PGA) et électroniques (EG). Pour obtenir une commande de secours, le système électronique doit être à action inverse (une augmentation de la consommation de carburant est requise par une réduction du courant dans la partie actionneur du PGA-EG).
Le réglage de la vitesse du régulateur mécanique légèrement supérieure à celle du système de régulation électronique fait que la partie mécanique du PGA-EG recherche toujours un réglage de carburant supérieur à celui qui est contrôlé par la partie électrique du PGA-EG. La commande électrique contrôle donc la position du carburant en raison de la fonction de sélection du moins de carburant possible.
Si le signal électronique vers le PGA-EG tombe à 0, en raison d’un problème dans le système, l’actionneur électrique demandera une augmentation de la position du carburant au-dessus du réglage du régulateur mécanique. A ce point, le réglage de la vitesse mécanique est plus bas et la tête sphérique contrôle le réglage du carburant du moteur.
Bien que la vitesse soit légèrement plus élevée sous contrôle mécanique, il n’y a pas de survitesse ou d’arrêt brut en raison d’une perte de signal de la commande électronique.
Des commandes PGA-EG à action directe sont disponibles. Ces unités passeront au carburant minimum en cas de perte du signal de commande électronique.