Caractéristiques
- Conversion du bus CAN (CAL 2.0) à l’un des protocoles acceptés par l’industrie
- Réglage des différentes interfaces, bus, et Protocoles
- Transmission des données de process d’un réseau autonome couplé via CAN Bus
- Intervention dans les processus utilisant un PC, un PLC ou un contrôle Système
- Amplificateur servant au pont grandes sections dans les Réseaux
- Visualisation du processus Données
- Configuration à distance de appelées unités Woodward et Dispositifs
- Interface avec le logiciel LeoPC1 utilisé pour la configuration, la visualisation, la télécommande, journalisation des données, enregistreur d’événements et gestion des utilisateurs
- Affichage LC à deux lignes
- Interfaces de communication sont électriquement isolé
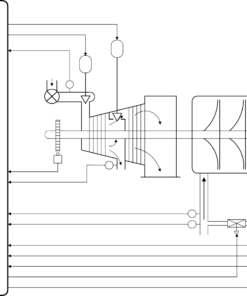
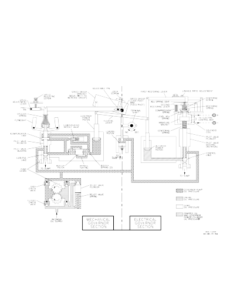
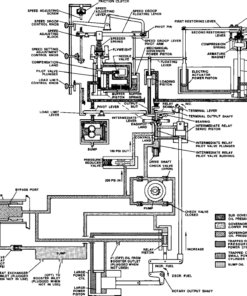
Pour les schémas de câblage et Liste des paramètres, veuillez regarder dans le manuel technique GW 4.